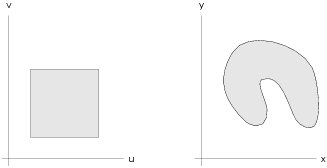
A coordinate transformation of the plane is a
function ![]() . I'll usually assume that f has
continuous partial derivatives, and that f is "essentially"
one-to-one in the region of interest. (A function is one-to-one if different inputs produce different
outputs.)
. I'll usually assume that f has
continuous partial derivatives, and that f is "essentially"
one-to-one in the region of interest. (A function is one-to-one if different inputs produce different
outputs.)
A coordinate transformation will usually be given by an equation ![]() . You can think of it as deforming or moving things
in the u-v plane and placing them in the x-y plane.
. You can think of it as deforming or moving things
in the u-v plane and placing them in the x-y plane.
I'm going to look at some important special cases.
1. Linear transformations. You know that a linear transformation ![]() has
the form
has
the form
![]()
a, b, c, and d are numbers. In equation form, this is
![]()
"Linear transformation" is long to write and say, so I'll often use linear map for short.
Linear maps always leave the origin fixed, since ![]() ,
, ![]() gives
gives ![]() ,
, ![]() . (This is another
way of saying that linear maps take the zero vector to the zero
vector.) And as you might expect, linear maps carry lines to lines.
. (This is another
way of saying that linear maps take the zero vector to the zero
vector.) And as you might expect, linear maps carry lines to lines.
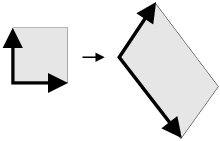
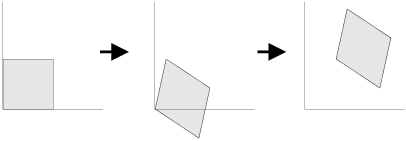
Moreover, a linear map takes squares to parallelograms:
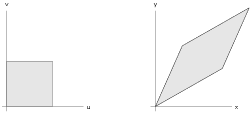
For example, look at what happens to the unit square ![]() ,
, ![]() :
:
![]()
![]()
The vectors ![]() ,
, ![]() determine the unit square. They are mapped to the vectors
determine the unit square. They are mapped to the vectors ![]() ,
, ![]() , two adjacent sides
of the parallelogram.
, two adjacent sides
of the parallelogram.
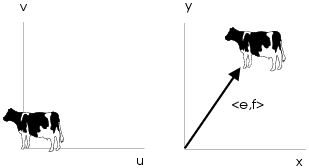
2. Translations. A
translation ![]() has the form
has the form
![]()
e and f are numbers. This translation just translates everything by
the vector ![]() .
.
A translation by a nonzero vector is not a linear map, because linear maps must send the zero vector to the zero vector. However, translations are very useful in performing coordinate transformations. I'll introduce the following terminology for the composite of a linear transformation and a translation.
Definition. Let A be a real ![]() matrix. An affine map is a
function
matrix. An affine map is a
function ![]() of the form
of the form
![]()
Example. Find an affine map which carries
the unit square ![]() ,
, ![]() to the
parallelogram in the x-y plane with vertices
to the
parallelogram in the x-y plane with vertices ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
I'm going to make a rough sketch of the parallelogram first. I want to know the orientation of the vertices --- e.g. that B and C are next to A, and that D is opposite A.
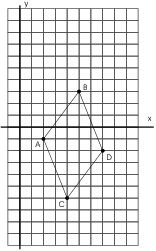
I'm going to do the transformation in two steps. First, I'll take the square to a parallelogram which is the right size and shape, but which has a corner at the origin. Next, I'll move the parallelogram so it's at the right place.
The vectors from A to B and to C are ![]() and
and ![]() . I saw
above that if I construct a matrix with
. I saw
above that if I construct a matrix with ![]() as the
first column and
as the
first column and ![]() as the second
column, then it will multiply
as the second
column, then it will multiply ![]() to
to ![]() and
and ![]() to
to ![]() :
:
![]()
So the following transformation takes the unit square to a parallelogram of the right shape:
![]()
This transformation takes ![]() to
to ![]() ; I want
; I want ![]() to go to the point A (which I used as the base point
for my two vectors). To fix this, just translate by A:
to go to the point A (which I used as the base point
for my two vectors). To fix this, just translate by A:
![]()
3. Rotations. A
rotation counterclockwise through an angle ![]() is given by
is given by
![]()
To see this, just check that the unit vectors ![]() ,
, ![]() go to the right
places:
go to the right
places:
![]()
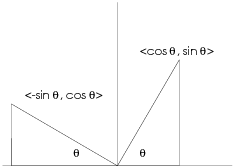
You can see from the picture that ![]() and
and
![]() have both been rotated by an angle
have both been rotated by an angle ![]() . Other vectors can be built out of these two
vectors, so other vectors are rotated by
. Other vectors can be built out of these two
vectors, so other vectors are rotated by ![]() as well.
as well.
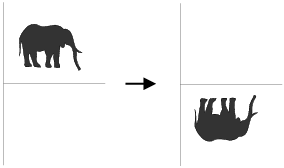
4. Reflections. This is how to do a reflection across the x-axis:
![]()
It is clear that this reflects things across the x-axis, because it simply negates the second component.
What about reflection across a line L making an angle ![]() with the origin? It's messy to do using analytic
geometry, but very easy using matrices. Simply do a rotation through
with the origin? It's messy to do using analytic
geometry, but very easy using matrices. Simply do a rotation through
![]() which carries L to the
which carries L to the ![]() . Next, reflect
across the x-axis. Finally, do a rotation through
. Next, reflect
across the x-axis. Finally, do a rotation through ![]() which carries the x-axis back to L. Each of these
transformations can be accomplished by matrix multiplication; just
multiply the three matrices to do reflection across L.
which carries the x-axis back to L. Each of these
transformations can be accomplished by matrix multiplication; just
multiply the three matrices to do reflection across L.
Translations, rotations, and reflections are examples of rigid motions. They preserve distances between points, as well as areas.
Example. Find a real ![]() matrix A such that
matrix A such that
![]()
reflects points across the line ![]() .
.
The line ![]() makes an angle of
makes an angle of ![]() with the positive x-axis. I can accomplish this
transformation as follows:
with the positive x-axis. I can accomplish this
transformation as follows:

Thus,
![$$A = \left[\matrix{\cos \dfrac{\pi}{3} & -\sin \dfrac{\pi}{3} \cr \noalign{\vskip2pt} \sin \dfrac{\pi}{3} & \cos \dfrac{\pi}{3} \cr}\right] \left[\matrix{1 & 0 \cr 0 & -1 \cr}\right] \left[\matrix{\cos \dfrac{\pi}{3} & \sin \dfrac{\pi}{3} \cr \noalign{\vskip2pt} -\sin \dfrac{\pi}{3} & \cos \dfrac{\pi}{3} \cr}\right] = \left[\matrix{-\dfrac{1}{2} & \dfrac{\sqrt{3}}{2} \cr \noalign{\vskip2pt} \dfrac{\sqrt{3}}{2} & \dfrac{1}{2} \cr}\right].\quad\halmos$$](transform72.png)
Copyright 2008 by Bruce Ikenaga