I described a surface as a 2-dimensional object in space. Here is a more precise definition.
Definition. A surface
in ![]() is a function
is a function ![]() . If u and v are the input
variables (often called parameters) and x, y,
and z are the output variables, then S can be written in component
form as
. If u and v are the input
variables (often called parameters) and x, y,
and z are the output variables, then S can be written in component
form as
![]()
This is called a parametrization of the surface, or you might describe S as a parametric surface.
In most cases, we'll assume that f, g, and h are continuous, or perhaps even differentiable; we'll discuss continuity and differentiability for functions of several variables later.
Example. Consider the surface given by
![]()
Find the points on the surface corresponding to:
(a) ![]() .
.
(b) ![]() .
.
(c) ![]() .
.
In each case, find x, y, and z by plugging u and v into ![]() .
.

The next example shows that graphs of functions --- but also more general "graphs of functions" can be easily represented parametrically.
Example. (a) Parametrize the graph of ![]() .
.
(b) Parametrize the graph of ![]() .
.
(c) Check that the following equations give a parametrization of ![]() :
:
![]()
(a) Set each of the independent variables x and y to parameters, so
![]() and
and ![]() . Then
. Then
![]()
The parametrization is
![]()
Here's the graph using this parametrization:

(b) Set each of the independent variables x and y to parameters, so
![]() and
and ![]() . Then
. Then
![]()
The parametrization is
![]()
Here's the graph using this parametrization:

Notice that the surface is not the graph of a function ![]() , but it's easy to obtain a
parametrization. You can see that this procedure will work whenever
one of x, y, or z is a function of the other two.
, but it's easy to obtain a
parametrization. You can see that this procedure will work whenever
one of x, y, or z is a function of the other two.
(c) Plug ![]() and
and ![]() into
into ![]() :
:
![]()
![]()
The z-equation is satisfied.
Here's the graph using this parametrization. Notice that it looks different than the graph in (a).

The last example shows how you can check that a set of equations parametrizes a surface given in x-y-z form.
Example. The equation of a sphere of radius 1
centered at ![]() is
is
![]()
(If "1" is replaced by "![]() " for
" for ![]() , then the sphere
has radius a.) Show that this sphere can be represented
parametrically by
, then the sphere
has radius a.) Show that this sphere can be represented
parametrically by
![]()
Plug ![]() ,
, ![]() ,
, ![]() into
into ![]() :
:
![$$\eqalign{ x^2 + y^2 + z^2 & = (\sin p \cos t)^2 + (\sin p \sin t)^2 + (\cos p)^2 \cr & = (\sin p)^2 (\cos t)^2 + (\sin p)^2 (\sin t)^2 + (\cos p)^2 \cr & = (\sin p)^2 [(\cos t)^2 + (\sin t)^2] + (\cos p)^2 \cr & = (\sin p)^2 + (\cos p)^2 \cr & = 1 \cr}$$](parametric-surfaces40.png)
The equation ![]() is satisfied. Here's
the graph using this parametrization:
is satisfied. Here's
the graph using this parametrization:

By the way, the "p" and "t" for the parameters is
to anticipate that they eventually "turn into" ![]() and
and ![]() when we discuss spherical coordinates.
when we discuss spherical coordinates.
Example. Parametrize ![]() :
:
(a) As a function graph.
(b) Using a trig identity. What is a limitation of this method?
(a) Set ![]() and
and ![]() and plug into the
given equation to get z:
and plug into the
given equation to get z:
![]()
Here's the graph using this parametrization.

(b) The difference of squares makes me think of the identity ![]() . So let
. So let
![]()
Then
![]()
One problem here is that the range of v must avoid discontinuities in
![]() and
and ![]() : For example, both trig
functions "blow up" at
: For example, both trig
functions "blow up" at ![]() . Thus,
I have to be a little careful in using this parametrization to graph
the surface.
. Thus,
I have to be a little careful in using this parametrization to graph
the surface.
Here's the graph using this parametrization. Notice how different it looks than the graph in (a).

If a surface is given by an equation involving only two variables, the following procedure can often be used to produce a parametrization.
1. Set the third variable --- the one that doesn't appear in the equation --- equal to one of the parameters.
2. Think of the given equation as the equation of a curve. Use the remaining parameter to parametrize the curve.
Example. Parametrize the cylinder in ![]() given by
given by
![]()
Notice that in 2 dimensions ![]() is the
equation of a circle. The equation does not involve z, so I set
is the
equation of a circle. The equation does not involve z, so I set ![]() .
.
Next, I must parametrize ![]() . I can use
the standard parametrization of the circle as a curve:
. I can use
the standard parametrization of the circle as a curve:
![]()
Here's the graph using this parametrization.

Example. ( A surface lying in a plane) Describe the surface parametrized by
![]()
Since ![]() , the entire surface lies in the plane
, the entire surface lies in the plane ![]() .
.
You may recognize the first two equations as being the polar
coordinate conversion equations. For ![]() and
and ![]() , I
will get all the points in the disk of radius 1 centered at the
origin --- but because
, I
will get all the points in the disk of radius 1 centered at the
origin --- but because ![]() , the disk will lie 1 unit
above the x-y-plane.
, the disk will lie 1 unit
above the x-y-plane.
Here's the graph using this parametrization.

A surface of revolution is generated by revolving a curve about a line. The line about which the curve is revolved is called the axis of revolution. For simplicity, I'll assume that the line and the curve lie in one of the coordinate planes, and that the axis of revolution is one of the coordinate axes.
An x-y curve will lie in the x-y-plane, a y-z-curve will lie in the y-z-plane, and an x-z-curve will lie in the x-z-plane. The curve will usually be given in parametric form; if it isn't, you should begin by parametrizing the curve.
To derive a parametrization, I'll use "A", "B", and "C" for the coordinate axes. That way there's less of a risk of confusing variables when I apply these results to a particular problem.
So suppose I have a curve in the A-B plane, and it is being revolved about the A-axis. And suppose the curve has parametric equations
![]()
I'm writing "A" first and "B" second, but the order isn't important as long as I'm consistent.

In this picture, you can imagine the C-axis sticking out of the A-B-plane.
A point on the curve moves in a circle around the A-axis. Notice that the circle is parallel to the B-C plane.
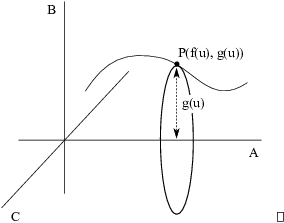
The A-coordinate of P is ![]() . To get the B and C
coordinates, look at the circle that P moves in:
. To get the B and C
coordinates, look at the circle that P moves in:

Letting v be the radial angle, the right triangle shows that
![]()
Therefore, the surface of revolution can be parametrized by
![]()
Remarks. (a) One way to think about this is
that since the curve is revolved about the A-axis, a point on the
surface has the same A-coordinate as the point on the curve that
"revolved to it". Thus, ![]() : The A-component is the same for the curve and the
surface.
: The A-component is the same for the curve and the
surface.
The revolution is occurring parallel to the B-C-plane, so for B and C
you use the B-component for the curve multiplied by ![]() and
and ![]() to get points on the circle.
to get points on the circle.
(b) If you switch ![]() and
and ![]() but leave everything else the same, you'll get the
same surface. As usual when you do this, the individual circles will
get traced out in the opposite direction.
but leave everything else the same, you'll get the
same surface. As usual when you do this, the individual circles will
get traced out in the opposite direction.
Example. Parametrize the surface generated by revolving the following circle about the z-axis:
![]()
First, parametrize the circle:
![]()
(You can check that it works by substituting for x and y in the circle equation.)
In terms of the notation above, y corresponds to B and z corresponds to A. Hence, x corresponds to C. Thus,
![]()
The parametrization is
![]()
Here's the graph using this parametrization.

This surface is called a torus.![]()
Next, I'll describe how to parametrize a parallelogram in space. Suppose the vertices of the parallelogram (counterclockwise around the parallelogram) are A, B, C, and D.

I'll construct a function ![]() which maps the unit square
which maps the unit square ![]() ,
, ![]() to the parallelogram, in such as way that
to the parallelogram, in such as way that
![]()
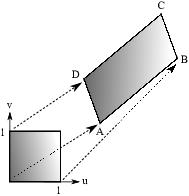
Suppose that A is ![]() and
and ![]() and
and ![]() . The transformation is defined by
the following matrix equation:
. The transformation is defined by
the following matrix equation:
![$$(x, y, z) = f(u, v) = \left[\matrix{ a & d \cr b & e \cr c & f \cr}\right] \left[\matrix{u \cr v \cr}\right] + \left[\matrix{a_1 \cr a_2 \cr a_3 \cr}\right].$$](parametric-surfaces97.png)
The matrix ![$\displaystyle
\left[\matrix{a & d \cr b & e \cr c & f \cr}\right]$](parametric-surfaces98.png) deforms the original square so it has the
same shape as the parallelogram. Then the vector corresponding to A
is added to translate the deformed square onto the parallelogram.
deforms the original square so it has the
same shape as the parallelogram. Then the vector corresponding to A
is added to translate the deformed square onto the parallelogram.
If you need to get equations for x, y, and z, you can multiply out and simplify the right side. It's best to leave the function in matrix form absent a need for the individual equations.
To check that this does what I claimed, try feeding in ![]() (for instance):
(for instance):
![$$f(1, 0) = \left[\matrix{ a & d \cr b & e \cr c & f \cr}\right] \left[\matrix{1 \cr 0 \cr}\right] + \left[\matrix{a_1 \cr a_2 \cr a_3 \cr}\right] = \left[\matrix{a \cr b \cr c \cr}\right] + \left[\matrix{a_1 \cr a_2 \cr a_3 \cr}\right] = \bvec{A B} + A = B.$$](parametric-surfaces100.png)
(For the last equality, note that if you start at A and add the
vector from A to B you wind up at B.) You can check in similar
fashion that ![]() goes to A and
goes to A and ![]() goes to D.
goes to D.
The ranges ![]() and
and ![]() give the parallelogram. If you use
give the parallelogram. If you use ![]() and
and ![]() you get the plane containing the
parallelogram. This shows how to get parametric equations for a
plane.
you get the plane containing the
parallelogram. This shows how to get parametric equations for a
plane.
Example. The vertices of a parallelogram,
listed counterclockwise, are ![]() ,
, ![]() ,
, ![]() , and
, and ![]() . Parametrize the parallelogram.
. Parametrize the parallelogram.
The vectors starting at A are
![]()
The parametrization is
![$$(x, y, z) = f(u, v) = \left[\matrix{ 1 & 3 \cr 1 & 1 \cr 1 & 0 \cr}\right] \left[\matrix{u \cr v \cr}\right] + \left[\matrix{1 \cr 1 \cr 2 \cr}\right].$$](parametric-surfaces112.png)
You can write this in component form by multiplying out and simplifying the right side:
![$$\left[\matrix{x \cr y \cr z \cr}\right] = \left[\matrix{ u + 3 v + 1 \cr u + v + 1 \cr u + 2 \cr}\right].$$](parametric-surfaces113.png)
That is,
![]()
Here's the graph using this parametrization.

The trick I'll illustrate in the next example works when you can decompose the surface (or its projection into a coordinate plane) into segments. Before I begin, recall that if P and Q are points, the line segment from P to Q may be parametrized by
![]()
If you use ![]() , you get the parametric
equation for the line through P and Q.
, you get the parametric
equation for the line through P and Q.
Example. Parametrize the part of the cylinder
![]() which extends from the x-y-plane to the
plane
which extends from the x-y-plane to the
plane ![]() .
.
The following picture illustrates the idea:

For each point P on the circle ![]() in the
x-y-plane, I construct the segment from P up to the point Q on the
plane
in the
x-y-plane, I construct the segment from P up to the point Q on the
plane ![]() . One parameter picks out the
point P on the base circle; the other parameter picks out the point
on the segment above it.
. One parameter picks out the
point P on the base circle; the other parameter picks out the point
on the segment above it.
The circle ![]() can be parametrized by
can be parametrized by
![]()
So ![]() is a point on the circle in the
x-y-plane. To get the point Q above P in the plane
is a point on the circle in the
x-y-plane. To get the point Q above P in the plane ![]() , substitute
, substitute ![]() ,
, ![]() in the plane equation:
in the plane equation:
![]()
Thus, ![]() lies
above P.
lies
above P.
The segment from P to Q is

The parametric equations are
![]()
Here's the graph using this parametrization.

Copyright 2024 by Bruce Ikenaga