A function ![]() can be thought of as
a curve in
can be thought of as
a curve in ![]() . Write the curve in parametric
form
. Write the curve in parametric
form
![]()
Think of the parameter t as time and the curve as being
traced out by a moving object, so that the object is at the position
![]() at time t.
at time t.
With this interpretation:
(a) ![]() is the velocity
vector of the object. It points in the direction that the object
is travelling at time t. Its length is the
speed of the object at time t.
is the velocity
vector of the object. It points in the direction that the object
is travelling at time t. Its length is the
speed of the object at time t.
(b) ![]() is the acceleration
vector of the object. It represents the direction and magnitude
of the change of the velocity vector at time t.
is the acceleration
vector of the object. It represents the direction and magnitude
of the change of the velocity vector at time t.
Example. Find the velocity and acceleration
vectors at ![]() for the curve with position
function
for the curve with position
function
![]()
The velocity is the derivative of the position:
![]()
The acceleration is the derivative of the velocity:
![]()
Setting ![]() gives
gives
![]()
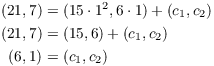
Example. The position of an evil lime jello at time t is
![]()
Find its velocity vector and its speed at ![]() .
.
The velocity is the derivative of the position:
![]()
The velocity at ![]() is
is
![]()
The speed is the length of the velocity vector:
![]()
Example. A cheeseburger moves on a circular helix given by
![]()
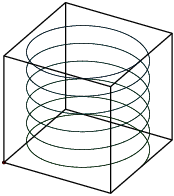
Show that it moves with constant speed.
The velocity vector is
![]()
The speed is the length of the velocity vector, which is
![]()
Thus, the cheeseburger moves with constant speed.![]()
Example. Prove that if a curve ![]() has constant length, then its velocity and position
vectors are always perpendicular.
has constant length, then its velocity and position
vectors are always perpendicular.
I'll use the fact that the square of the length of a vector equals the dot product of the vector with itself:
![]()
Suppose ![]() , where r is a constant. Then
use the identity above, differentiate, and apply the Product Rule for
dot products:
, where r is a constant. Then
use the identity above, differentiate, and apply the Product Rule for
dot products:
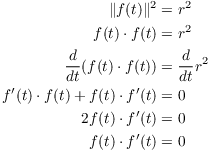
Since ![]() and
and ![]() have dot product 0, they are
perpendicular.
have dot product 0, they are
perpendicular.![]()
Note: To say that ![]() has constant length r
means that a point on the curve stays a constant distance r from the
origin. Thus, it must be moving on the sphere of radius r centered at
the origin.
has constant length r
means that a point on the curve stays a constant distance r from the
origin. Thus, it must be moving on the sphere of radius r centered at
the origin.
Since ![]() , you can integrate to find the
position function from the velocity:
, you can integrate to find the
position function from the velocity:
![]()
Likewise, since ![]() , you can integrate to
find the velocity from the acceleration:
, you can integrate to
find the velocity from the acceleration:
![]()
Antiderivatives are only determined up to an arbitrary constant. But you may be able to determine the arbitrary constant if you are given initial conditions.
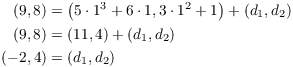
Example. The acceleration vector for a bacon quiche is
![]()
Find the position function ![]() , if
, if ![]() and
and ![]() .
.
![]()
Now ![]() , so
, so
Hence,
![]()
Next,
![]()
Now ![]() , so
, so
Hence,
![]()
Copyright 2018 by Bruce Ikenaga